[코드 리뷰] Tensor Slicing
실습 예제: Colab
1. Introduction
딥러닝 관련 논문을 읽으며 공부하다 보면 대부분의 논문 구현이 PyTorch(torch) 기반으로 되어 있음을 알 수 있다. 아래 그래프에서 볼 수 있듯이 2024년 기준 PyTorch, TensorFlow, JAX 중 PyTorch를 사용한 프로젝트가 제일 많은 비중을 차지하는 것을 볼 수 있다 [1].

1.1. Tensor Slicing이란?
텐서 슬라이싱은 다차원 배열에서 원하는 부분만 선택적으로 추출하는 연산으로 NumPy의 배열 인덱싱에서 유래했고 PyTorch도 동일한 문법을 사용한다 (NumPy-like).
1.2. 왜 필요한가?
딥러닝에서 텐서는 보통 (B, H, W, C) 같은 고차원 구조를 가진다. 모델 내부에서 특정 배치만, 특정 채널만, 특정 공간 위치만 꺼내서 연산해야 할 일이 매우 많다. 슬라이싱 없이는 불필요한 데이터까지 복사하거나 반복문으로 순회해야 하는데, 슬라이싱은 이걸 뷰(view) 방식으로 해결한다.
1.3. 원리
핵심은 “메모리를 복사하지 않는다”는 것이다.
텐서는 내부적으로 두 가지로 구성되는데:
- storage: 실제 데이터가 1D로 연속 저장된 메모리
- stride + offset: “몇 칸 건너뛰면 다음 원소인지”를 기술하는 메타데이터
슬라이싱을 하면 storage는 그대로 두고 stride와 offset만 바꾼 새 텐서 객체를 반환하기 때문에 빠르고 메모리 효율적이다 [2].
메모리를 복사하지 않는 것으로 문제가 생길 수 있는데, 이 부분은 3장에서 다룬다.
import torch
import matplotlib.pyplot as plt
t = torch.zeros(3, 3, 3, 3) # (B, H, W, C)
print(t[0].shape)
print(t[:, 1, :, :].shape)
print(t[..., 0].shape)
print(t[0:2].shape)
torch.Size([3, 3, 3])
torch.Size([3, 3, 3])
torch.Size([3, 3, 3])
torch.Size([2, 3, 3, 3])
print(t.stride())
print(t[0].stride())
print(t[:, 1].stride())
t_slice = t[0]
print(t_slice.data_ptr() == t.data_ptr())
(27, 9, 3, 1)
(9, 3, 1)
(27, 3, 1)
True
2. 시각화로 텐스 슬라이싱 제대로 보기
본 글에서는 사람들의 이해를 돕기 위해 matplotlib로 시각화한다. Computer Vision 영역에서 제일 많이 사용되는 4D [B, H, W, C] 형태를 시각화 할 것이며, [3,3,3,3] 사이즈의 boolean 자료형의 입력을 사용한다. 이때 B는 batch 사이즈이고, H는 이미지의 높이, W는 이미지의 너비, C는 RGB로 판단한다. 따라서 $3^2$ 크기의 컬러 이미지 3개가 있는 상황이다.
기본적으로 tensor.zeros().dtype(bool) 로 4차원 False tensor를 생성하여 슬라이싱 되는 부분만 True로 변환하여 어떤 부분이 슬라이싱 되는지 시각화한다.
우리들의 천하무적 클로드가 visualize_tensor()라는 시각화 코드를 만들어줬다:
코드 정보
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.patches as mpatches
from mpl_toolkits.mplot3d.art3d import Poly3DCollection
RGB_COLORS = ['red', 'green', 'blue']
RGB_LABELS = ['R', 'G', 'B']
def draw_cube(ax, x, y, z, filled=False, color='steelblue'):
vertices = np.array([
[x, y, z], [x+1, y, z], [x+1, y+1, z], [x, y+1, z],
[x, y, z+1], [x+1, y, z+1], [x+1, y+1, z+1], [x, y+1, z+1],
])
faces = [
[vertices[0], vertices[1], vertices[2], vertices[3]],
[vertices[4], vertices[5], vertices[6], vertices[7]],
[vertices[0], vertices[1], vertices[5], vertices[4]],
[vertices[2], vertices[3], vertices[7], vertices[6]],
[vertices[0], vertices[3], vertices[7], vertices[4]],
[vertices[1], vertices[2], vertices[6], vertices[5]],
]
if filled:
poly = Poly3DCollection(faces, alpha=0.5,
facecolor=color, edgecolor='black', linewidth=0.5)
else:
poly = Poly3DCollection(faces, alpha=0.03,
facecolor='white', edgecolor='gray', linewidth=0.3, linestyle='--')
ax.add_collection3d(poly)
def visualize_tensor(tensor):
if hasattr(tensor, 'numpy'):
arr = tensor.numpy().astype(bool)
else:
arr = np.asarray(tensor, dtype=bool)
assert arr.shape == (3, 3, 3, 3), "Input must be [3,3,3,3]"
B, H, W, C = arr.shape
fig = plt.figure(figsize=(5 * B, 6))
for b in range(B):
ax = fig.add_subplot(1, B, b + 1, projection='3d')
for h in range(H):
for w in range(W):
for c in range(C):
draw_cube(ax, w, c, h,
filled=bool(arr[b, h, w, c]),
color=RGB_COLORS[c]) # c=0→R, c=1→G, c=2→B
ax.set_xlabel('C', labelpad=6)
ax.set_ylabel('W', labelpad=6)
ax.set_zlabel('H', labelpad=6)
ticks = [0.5, 1.5, 2.5]
ax.set_xticks(ticks); ax.set_xticklabels(RGB_LABELS, fontsize=7) # R/G/B 표기
ax.set_yticks(ticks); ax.set_yticklabels(['1', '2', '3'], fontsize=7)
ax.set_zticks(ticks); ax.set_zticklabels(['1', '2', '3'], fontsize=7)
ax.set_xlim(0, C); ax.set_ylim(0, W); ax.set_zlim(0, H)
ax.set_title(f'B={b+1}', fontsize=11)
ax.view_init(elev=20, azim=-60)
# Legend: R/G/B + False
patches = [mpatches.Patch(facecolor=c, edgecolor='black', label=f'True ({l})')
for c, l in zip(RGB_COLORS, RGB_LABELS)]
patches.append(mpatches.Patch(facecolor='white', edgecolor='gray', label='False', linestyle='--'))
fig.legend(handles=patches, loc='lower center',
ncol=4, fontsize=9, frameon=True, bbox_to_anchor=(0.5, 0.0))
plt.suptitle('[B, H, W, C] Tensor Slice Visualization', fontsize=13, y=1.01)
plt.tight_layout()
plt.show()
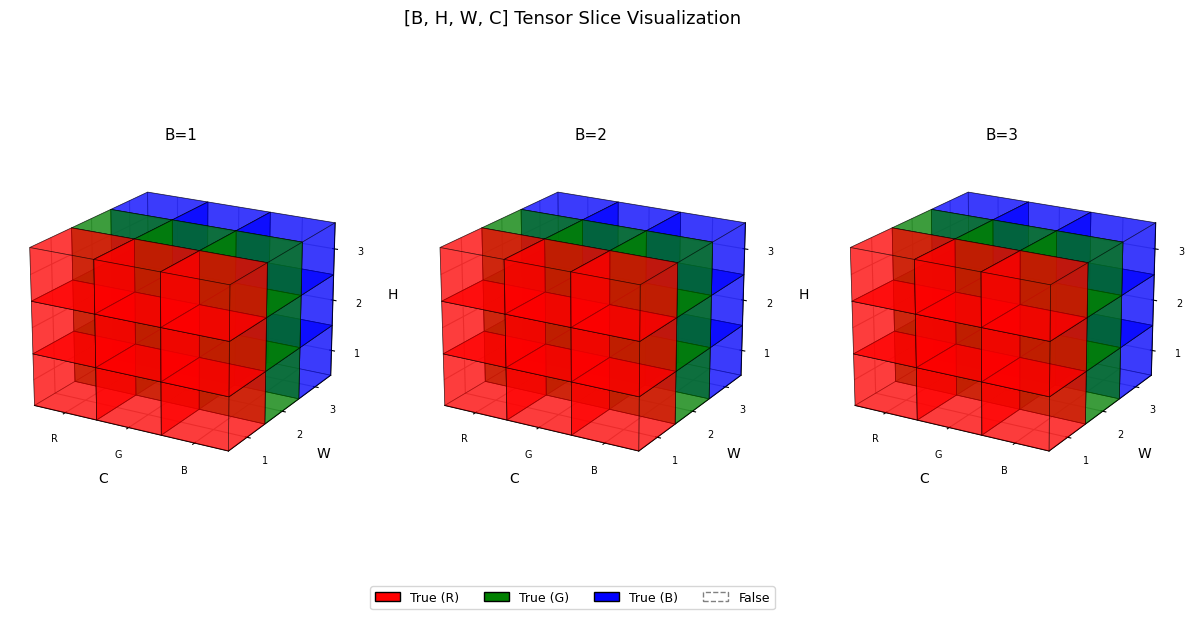
전체 체크
t1 = torch.ones([3,3,3,3], dtype=bool)
visualize_tensor(t1)
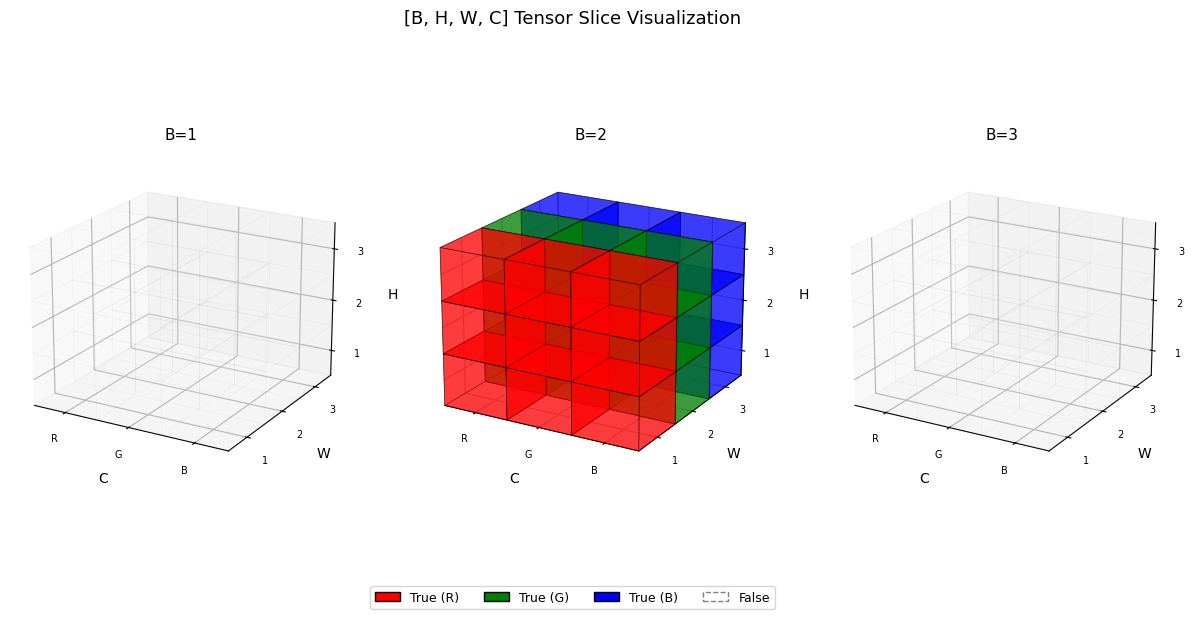
두번째 이미지만 슬라이싱
t = torch.zeros([3,3,3,3], dtype=bool)
t[1,:,:,:] = True
visualize_tensor(t)
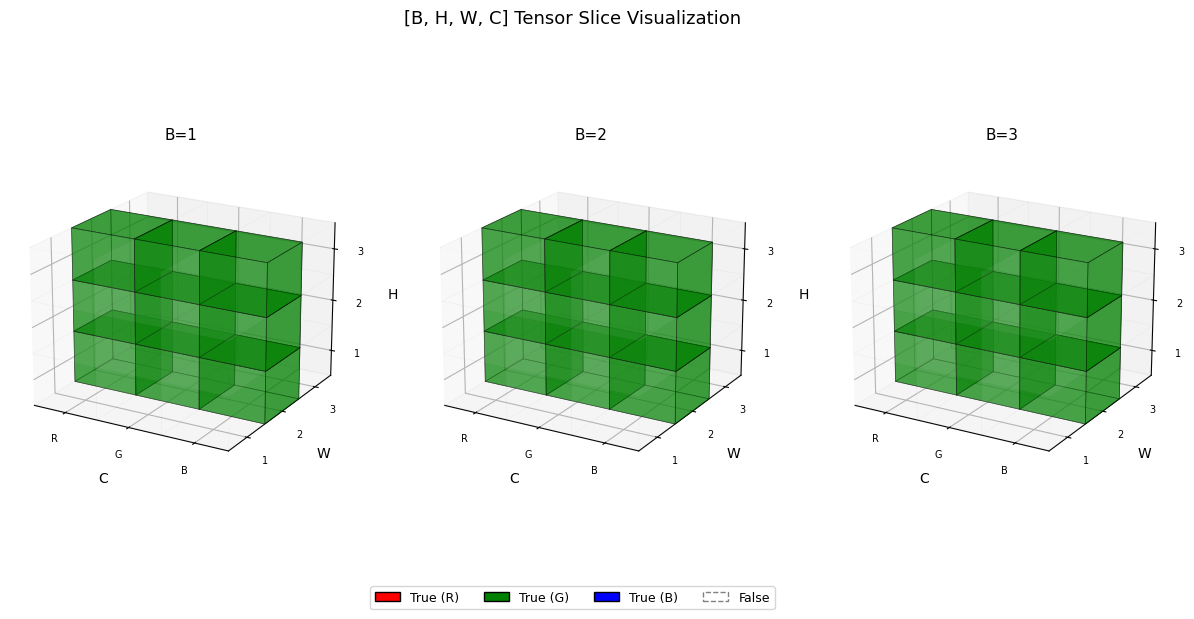
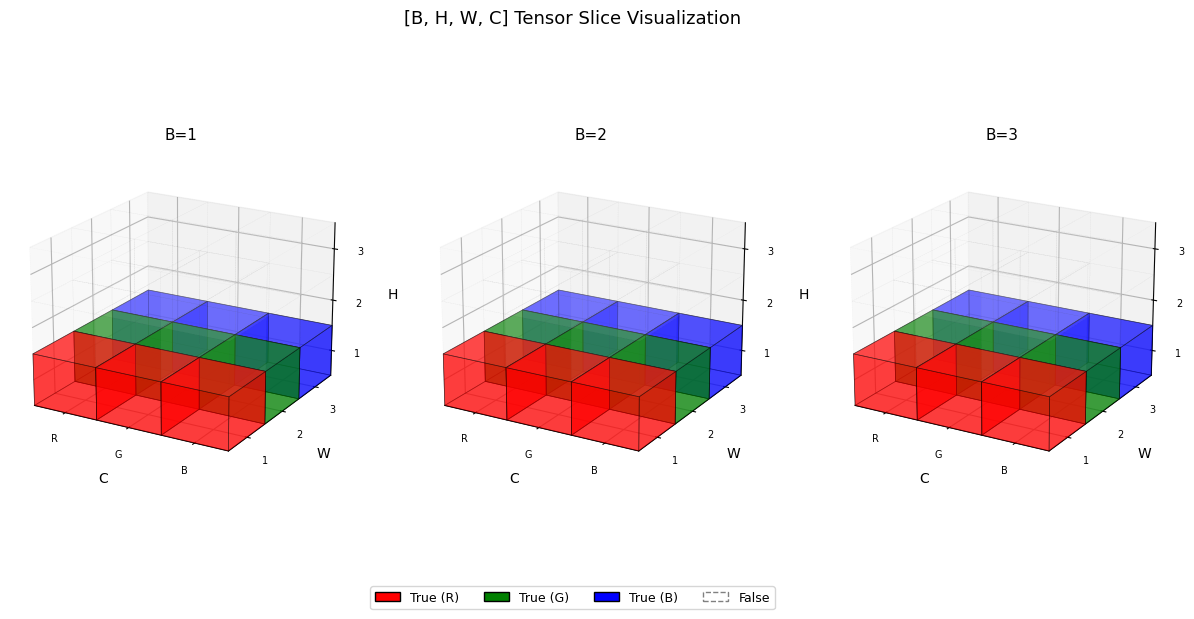
RGB 중 G만 시각화
...(Ellipsis)는 “나머지 차원은 전부 : 로 채워줘” 라는 뜻이다.
t = torch.zeros([3,3,3,3], dtype=bool)
t[:,:,:,1] = True
visualize_tensor(t)
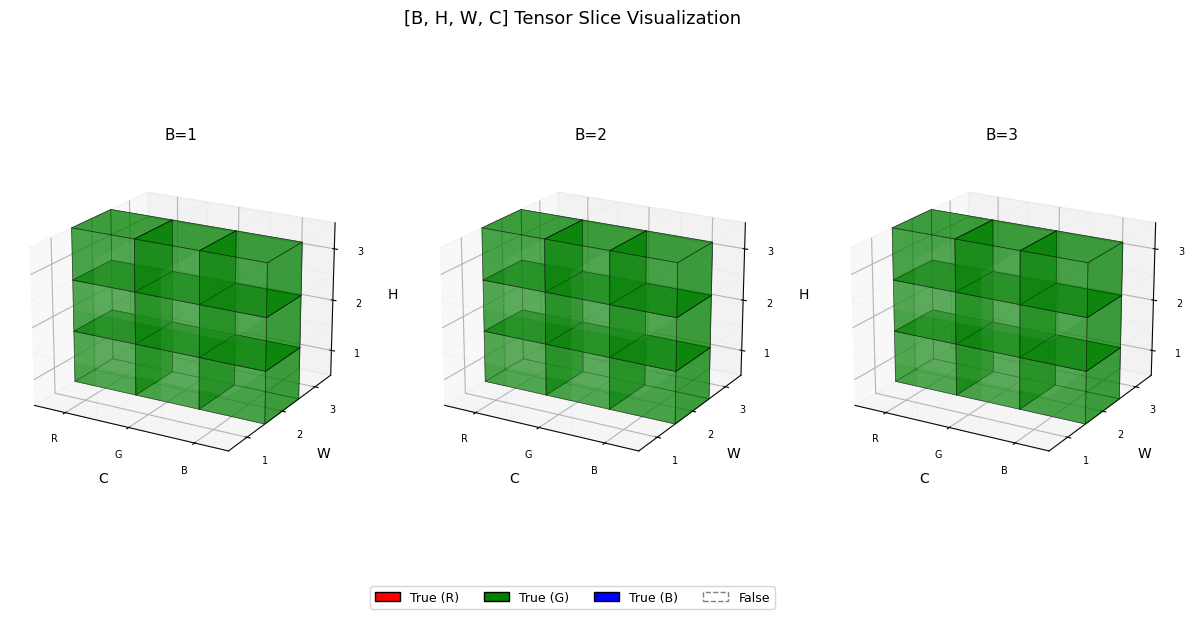
t = torch.zeros([3,3,3,3], dtype=bool)
t[...,1] = True
visualize_tensor(t)
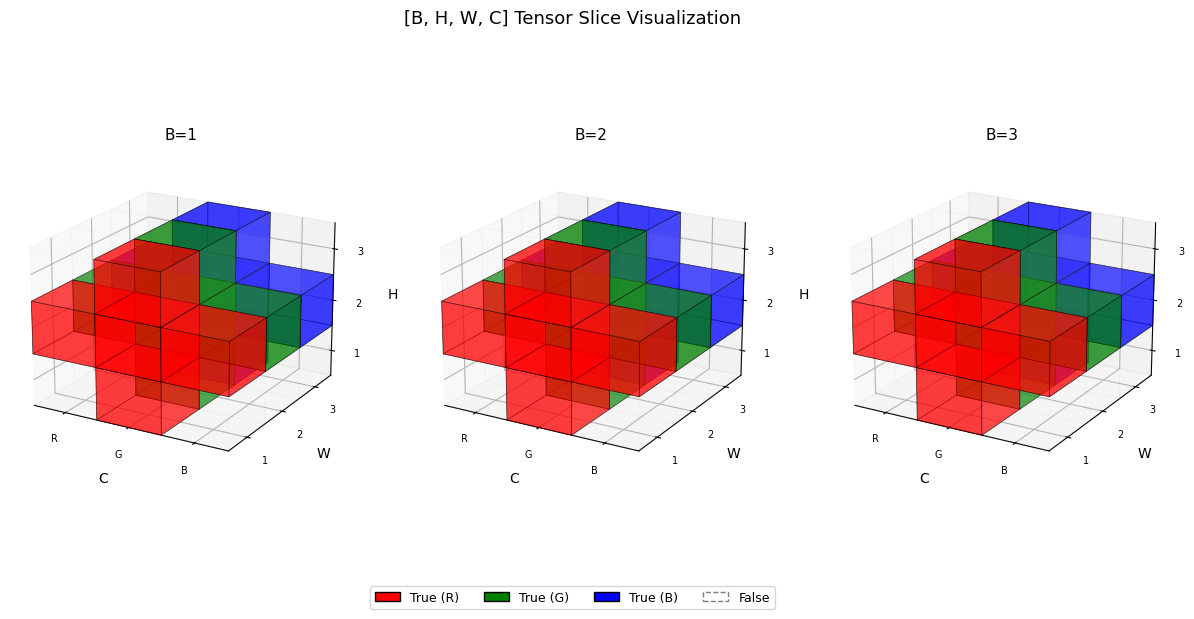
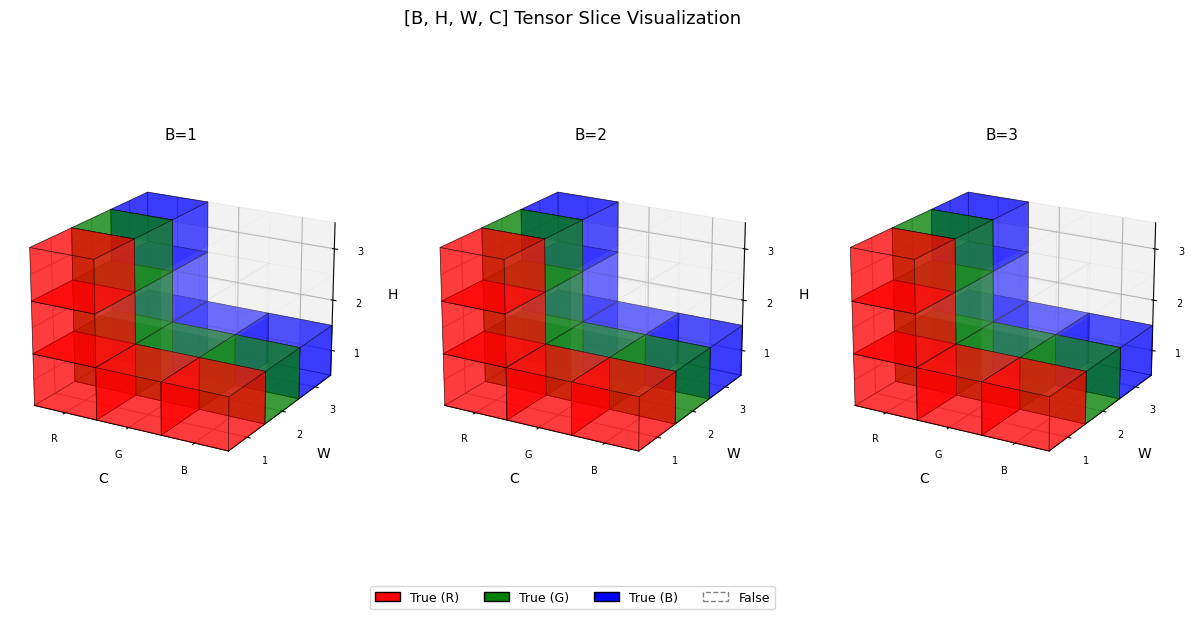
십자가 모양으로 슬라이싱
t = torch.zeros([3,3,3,3], dtype=bool)
t[:,1,...] = True
t[...,1,:] = True
visualize_tensor(t)
중심 부분만 슬라이싱
t = torch.zeros([3,3,3,3], dtype=bool)
t[:,1,1,:] = True
visualize_tensor(t)
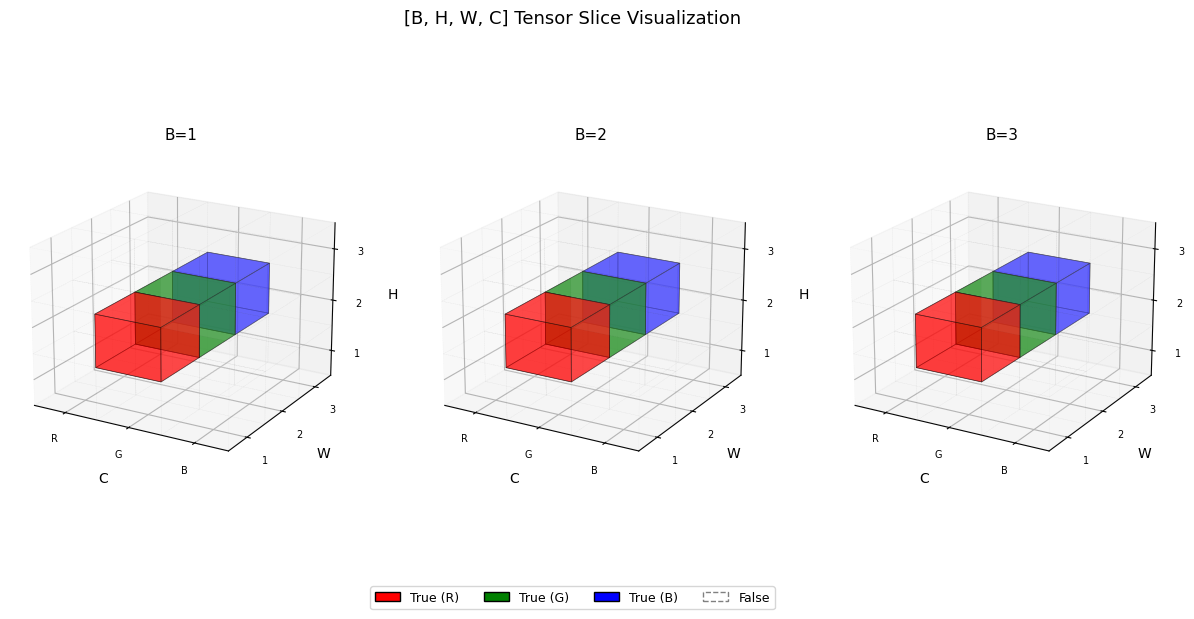
멋지게 인덱싱 해보기
# 안 멋진 방법
t = torch.zeros([3,3,3,3], dtype=bool)
t[:,0,0,0] = True
t[:,1,1,1] = True
t[:,2,2,2] = True
visualize_tensor(t)
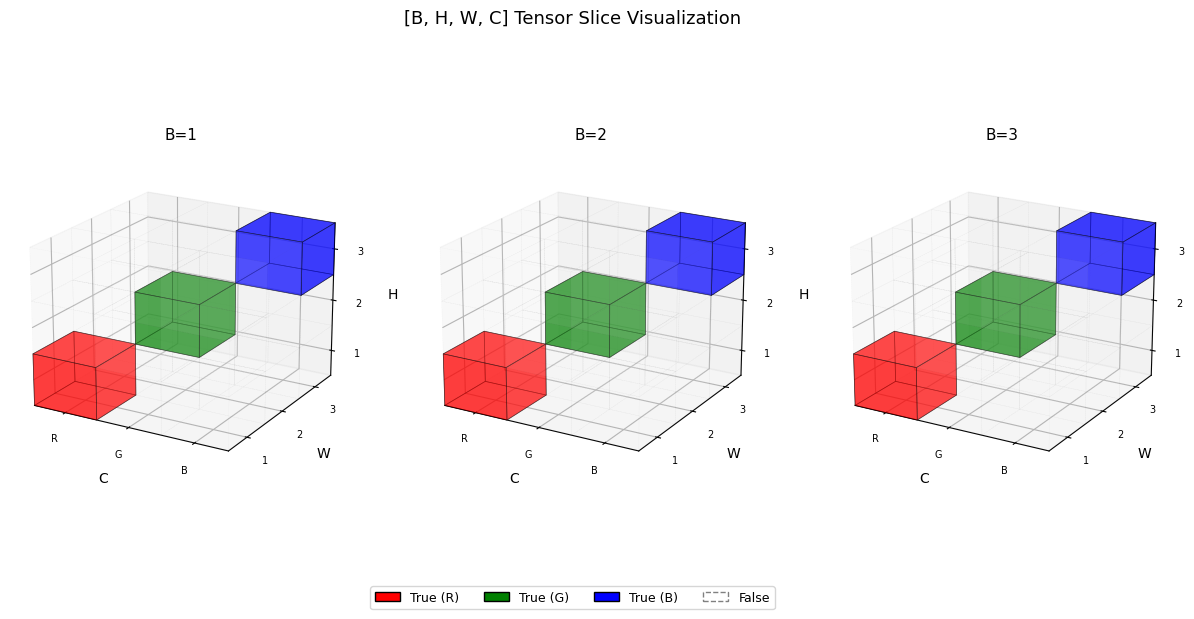
# 멋진 방법
t = torch.zeros([3,3,3,3], dtype=bool)
idx = torch.arange(3)
t[:, idx, idx, idx] = True # H=W=C 인 대각선
visualize_tensor(t)
t = torch.zeros([3,3,3,3], dtype=bool)
t[:, 0] = True # R채널만, shape [B, H, W]
visualize_tensor(t)
t = t.T
t[:, 0] = True # R채널만, shape [B, H, W]
visualize_tensor(t)
3. contiguous()에 대하여
3.1. 메모리 레이아웃부터 이해하기
PyTorch 텐서는 내부적으로 1D 메모리(storage) 위에 존재한다. 예를 들어 shape [2, 3] 텐서는 실제로 메모리에 이렇게 저장된다:
메모리: [a, b, c, d, e, f]
↕
tensor([[a, b, c],
[d, e, f]])
이때 “다음 원소로 가려면 몇 칸 건너뛰어야 하는가”를 stride라고 한다.
import torch
t = torch.tensor([[1,2,3],[4,5,6]])
print(t.stride()) # (3, 1) → 행 이동시 3칸, 열 이동시 1칸
(3, 1)
3.2. 슬라이싱 후 stride가 꼬이는 상황
이 슬라이싱은 메모리를 복사하지 않고 stride/offset만 바꿔서 반환한다. 그 결과 메모리 상에서 원소들이 띄엄띄엄 놓이게 된다.
stride의 마지막 값이 1이 아니라는 건, 메모리에서 원소들이 연속적으로 붙어있지 않다는 뜻이다.
t = torch.zeros(3, 3, 3, 3)
t_slice = t[:, :, :, 1] # C 채널 중 G만 추출 → shape [3,3,3]
print(t.stride()) # (27, 9, 3, 1)
print(t_slice.stride()) # (27, 9, 3) ← 마지막이 1이 아님!
print(t_slice.is_contiguous()) # False
(27, 9, 3, 1)
(27, 9, 3)
False
3.3. 언제 문제가 터지나?
view()는 메모리가 연속적으로 배치되어 있다고 가정한다. 그래서 비연속 텐서에 .view()를 쓰면 에러가 발생한다.
t = torch.rand([1,2,2,2])
# transpose/permute는 stride 관계가 틀어져서 진짜 에러 발생
t_transposed = t.transpose(1, 2) # stride 관계가 깨짐
print(t_transposed.is_contiguous()) # False
try:
t_transposed.view(-1)
except RuntimeError as e:
print(e)
# 해결
print(t_transposed.contiguous().view(-1))
print(t_transposed.reshape(-1))
False
view size is not compatible with input tensor's size and stride (at least one dimension spans across two contiguous subspaces). Use .reshape(...) instead.
tensor([0.0949, 0.1639, 0.6846, 0.3884, 0.6910, 0.5094, 0.1464, 0.4296])
tensor([0.0949, 0.1639, 0.6846, 0.3884, 0.6910, 0.5094, 0.1464, 0.4296])
3.4. contiguous()의 역할
.contiguous()는 메모리를 새로 할당하고 데이터를 연속된 형태로 복사한다.
이때 실제 copy가 발생하기 때문에 주의가 필요하다.
t_cont = t_slice.contiguous()
print(t_cont.is_contiguous()) # True
print(t_slice.data_ptr() == t_cont.data_ptr()) # False → 다른 메모리
t_cont.view(-1) # 정상 작동
True
False
tensor([0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0.,
0., 0., 0.])
3.5. view() vs reshape() 정리
view() |
reshape() |
|
|---|---|---|
| contiguous 필요 | ✅ 반드시 | ❌ 아니어도 됨 |
| 동작 방식 | 항상 view (zero-copy) | contiguous면 view, 아니면 내부적으로 copy |
| 에러 발생 | 비연속이면 RuntimeError | 없음 |
실무에서는 보통 아래 두 패턴 중 하나를 쓴다:
# 패턴 1: 명시적으로 contiguous 보장 후 view
t_slice.contiguous().view(-1)
# 패턴 2: reshape에 맡기기 (더 간편)
t_slice.reshape(-1)
tensor([0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0.,
0., 0., 0.])
3.6. 실무에서 자주 만나는 케이스
Vision Transformer나 멀티헤드 어텐션 구현에서 특히 자주 나온다.
transpose()와 permute()는 항상 비연속 텐서를 반환하기 때문에, 이후에 view()를 쓸 계획이라면 .contiguous()를 습관적으로 붙여주는 것이 좋다.
B, H, W, C = 3, 3, 3, 3
feature_map = torch.zeros(B, H, W, C)
# [B, H, W, C] → 특정 채널 추 후 reshape
x = feature_map[:, :, :, 0] # shape [B, H, W], 비연속 가능성 있음
x = x.contiguous().view(B, -1) # 안전하게 flatten출
# transpose 후 reshape할 때
x = feature_map.transpose(1, 2) # transpose는 항상 비연속!
x = x.contiguous().view(B, -1)